Witold Kurski – były zawodnik bojerowy
ODDZIAŁYWANIE
ZMIAN TEMPERATURY NA POWŁOKĘ
LODOWĄ
W tym blogu omówimy jedynie
wpływ niektórych efektów termicznych na powłokę lodową. Są one bardzo ciekawe z punktu widzenia
teorii, jak pękanie lodu pod wpływem obniżającej się temperatury, pełzanie lodu i wyrównywanie jego nierówności
w przypadku ociepleń, a przy ponownym nawrocie mrozu po ociepleniach znów
pękanie ale według zupełnie innych mechanizmów. Po ociepleniach górna warstwa lodu przepojona wodą rozszerza się gdy nadejdzie mróz i wyślizguje
się na brzeg niszcząc drzewostan i
pomosty. Mniejsze pomosty ratują właściciele wyrąbując wokół nich lód, a
na jeziorze powstają spiętrzenia i
torosy będące przeszkodą dla żeglugi.
Przy pękaniu lodu pod wpływem obniżającej się temperatury
powstają zjawiska akustyczne, jezioro zaczyna przemawiać. Mechanizm jest
prosty. Pod wpływem powstałej szczeliny naruszona zostaje równowaga na całym
obszarze jeziora. W którymś miejscu powstają
warunki do zainicjowania kolejnej szczeliny i kolejny odgłos stamtąd dochodzi,
i ta sytuacja się powtarza. Tak przemawia natura i ten rytm odgłosów jest
podobny rytmu piania kogutów w porze letniej, jeśli we wsi w najbliższej
okolicy jest ich więcej, jak to zauważyła jedna z kursantek na obozie
bojerowym.
Warunki do zainicjowania pęknięcia i rozwoju szczeliny można
badać wykorzystując teorię Griffitha, ale dla ogółu bardziej przejrzyste będzie zastosowanie prostszych modeli z
zakresu elementarnej teorii wytrzymałości a dokładniej płyty zginanej walcowo
leżącej na podłożu sprężystym. Do obliczenia potrzebnych parametrów płyty i
podłoża sprężystego należy skorzystać z rysunku Fig.1
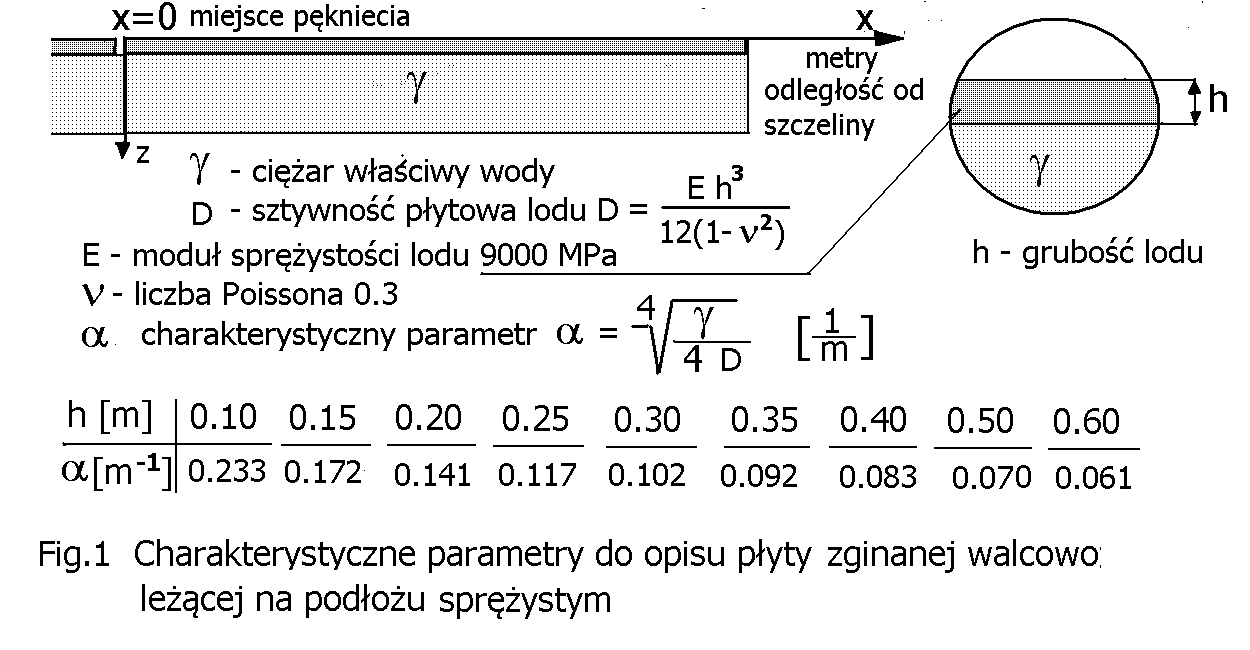
Mając do dyspozycji powyższy rysunek Fig.1 możemy od
razu obliczyć długość fali jaka
powstaje na lodzie jeziora. Należy tylko wykorzystać
zależność L
a = 2 p.
Na lodzie o grubości 20 cm długość fali wynosi 44.6 metra ,
a na lodzie grubości 40 cm
długość fali wyniesie 61.6 metra. Przy jeszcze grubszym
lodzie na przykład 60 cm długość fali wyniesie 103 metry. Z obserwacji jezior
można stwierdzić, że kolejne pęknięcia powstają od siebie właśnie w takich
odległościach i są one odpowiedzialne za nierówności powłoki lodowej.
Dlaczego po pęknięciach powstają nierówności powłoki
lodowej?
Jeśli szczelina jest linią prostą lub kształtem do niej zbliżona to do
analizy odkształconych półpłaszczyzn lodu można użyć modelu płyty na podłożu
sprężystym, ale zginanej walcowo. Nie są to obliczenia skomplikowane, a wyniki
dla lodu o grubości dwudziestu centymetrów
przy założeniu, że lód pęka gdy zostanie obciążony
naprężeniami 2 MPa są przedstawione na rysunku Fig.2. Po pęknięciu znikają siły ciągnące górną
powierzchnię lodu i krawędź płyty unosi się do góry, na pozostałej części
półpłaszczyzny powstają zafalowania zanikające wykładniczo wraz z oddalaniem
się od powstałej szczeliny. Teoria płyt
na podłożu sprężystym prowadzi do bardzo prostego wzoru na wartość
uniesienia krawędzi lodu po pęknięciu
jeśli pierwotnie powierzchnia lodu była płaska. Wzór ten zamieszczono na
rysunku Fig.2.

Powstałe fale zanikają wykładniczo wraz z oddalaniem się od
miejsca pęknięcia.
Wysokość wyniesienia krawędzi lodu 2.6 centymetra w górę,
może wydawać się niewielka, ale jeśli moduł sprężystości lodu będzie dwa lub
trzy razy mniejszy, to wyniesienie może być dwukrotnie lub trzykrotnie większe.
Takie rozrzuty modułu sprężystości lodu w badaniach naturalnych to nie wyjątek,
a raczej norma. Wyniesienie krawędzi lodu osiem centymetrów w górę stanowi
poważne niebezpieczeństwo dla ślizgu i załogi.
Jeśli jest mróz to woda w szczelinie pomiędzy sąsiednimi
polami lodowymi niezwłocznie zamarza sklejając oddzielne pola lodowe i
utrwalając powstałe nierówności. Szybka żegluga na takich nierównościach jest
dla załogi ślizgu bardzo uciążliwa, a dla ślizgu szkodliwa.
Po pewnym czasie rzędu dziesięciu dni do dwóch tygodni zjawisko pełzania lodu
spowoduje
wyrównanie powierzchni lodu ale radykalne przyspieszenie
wyrównania powierzchni następuje przy odwilżach. Przy wzroście temperatury lodu od minus 10 stopni
Celsjusza do
minus jednego stopnia, szybkość pełzania lodu wzrasta
dziesięciokrotnie i powierzchnia lodu szybko się wyrównuje.
W następnym blogu opiszemy kolejne zjawiska lodowe.
Opracowano 10 października 2017 roku.
Opracował na blogu - Paweł Kurski - fan żeglarstwa lodowego